这次的活动项目,我们要示范如何用威栗camera和威栗板并结合颜色辨识控制一台自动小车。
共包含四个步骤:连接威栗camera和PC,设定威栗camera以及用扩展板把它连到威栗板,通过程序积木对威栗camera进行编程,并将程序上传到安装于自动小车的威栗板上。
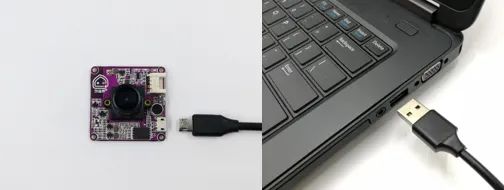
步骤一
您会需要使用Micro USB 2.0线把威栗camera连接到您的PC。
当绿,蓝,和红灯亮起就代表威栗camera已成功连接。
记得取下相机盖。
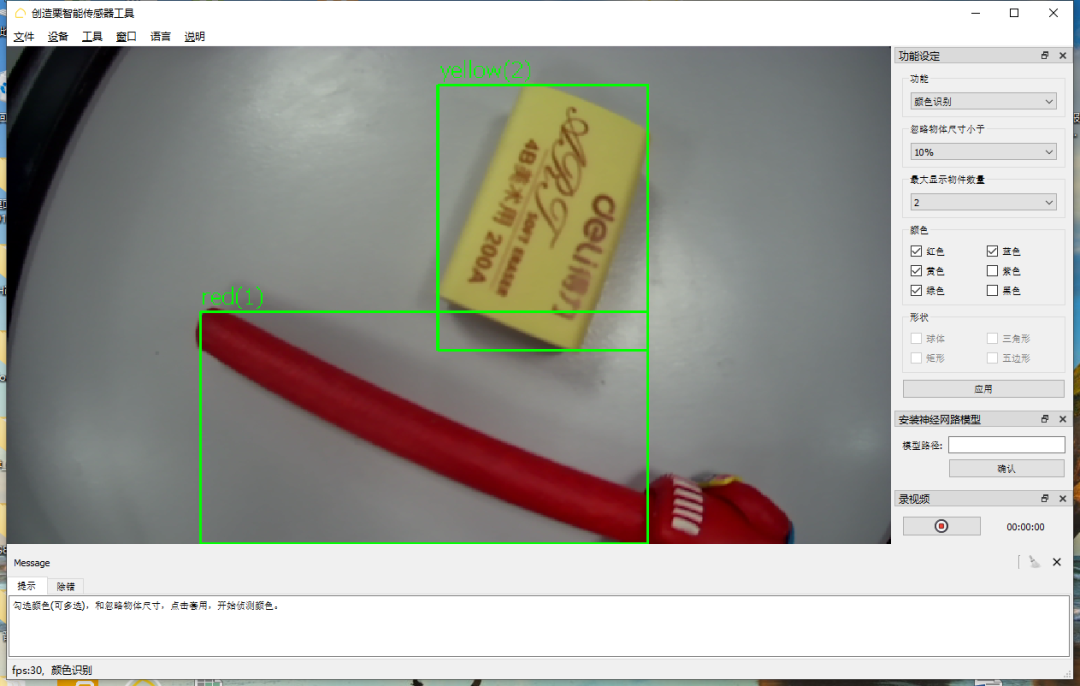
开启CZL智能传感器工具并且设定威栗camera辨识绿和红两个颜色。

当完成设定威栗camera,即可测试它来确定是否能侦测绿和红。
连接威栗camera和无人车。
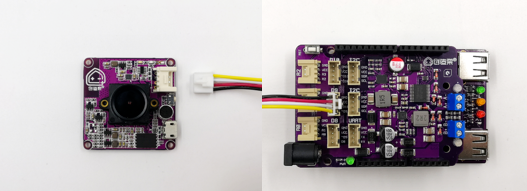
第一, 你需要将扩展板和威栗camera进行连接。
用Grove 连接线将扩展板连接至威栗camera。
确认Grove 线连至扩展板,且扩展板已连至威栗板。
开启CZL智能传感器工具,选择能够控制无人车程序的颜色。
绿色会使无人车往前开,红色会使它停。
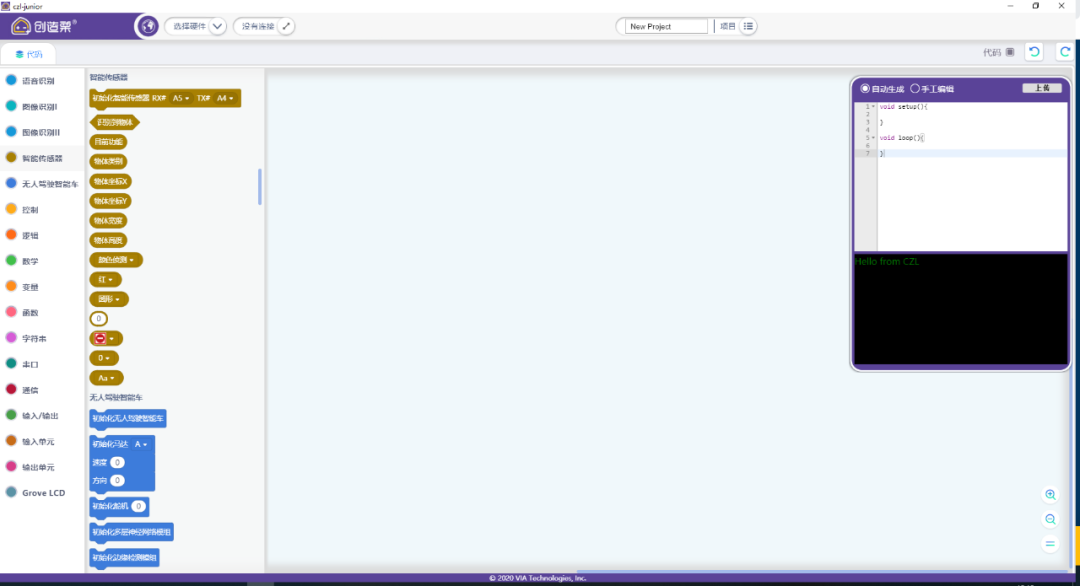
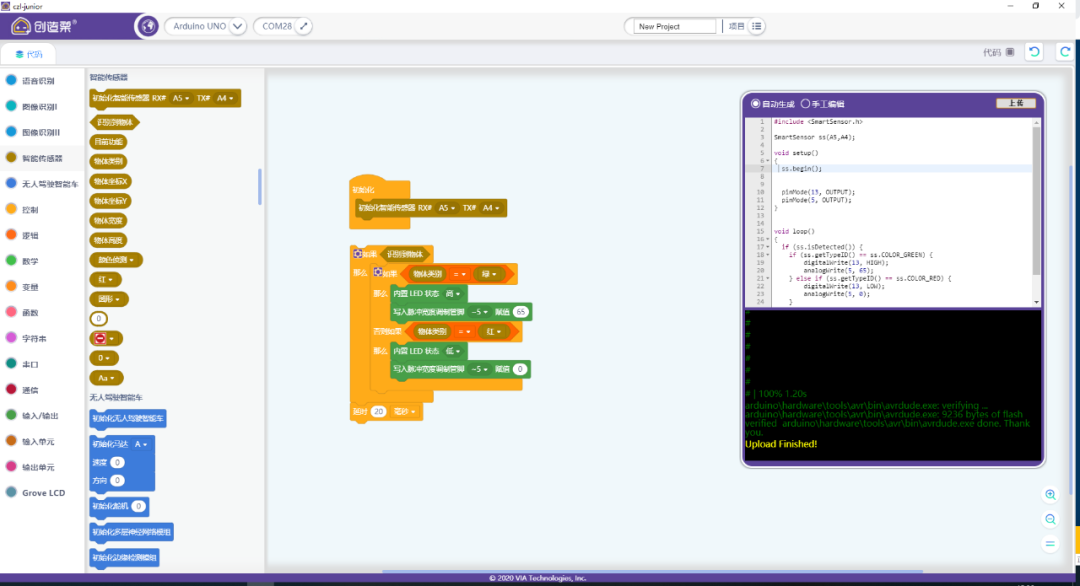
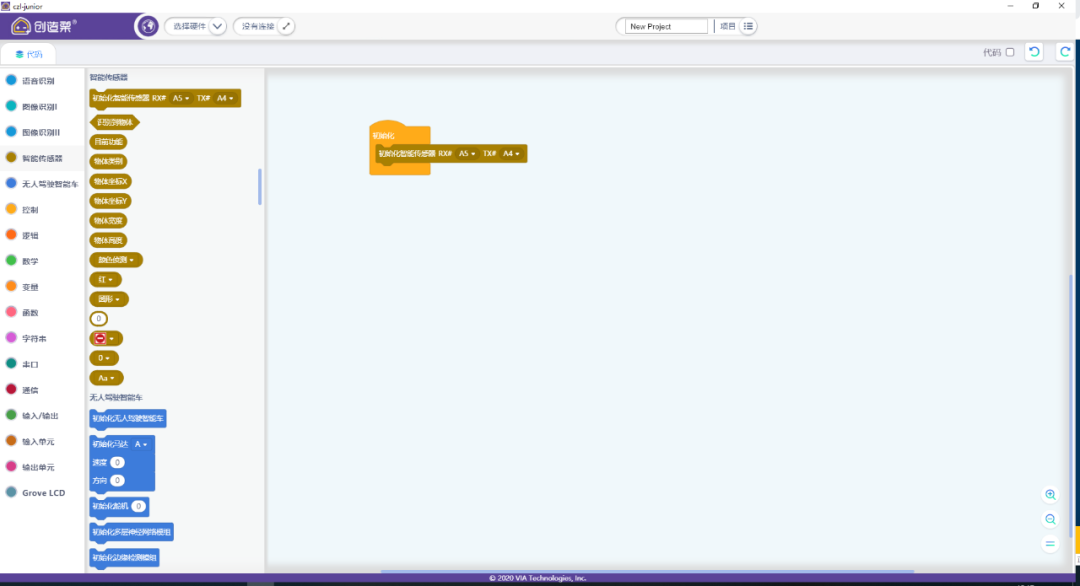
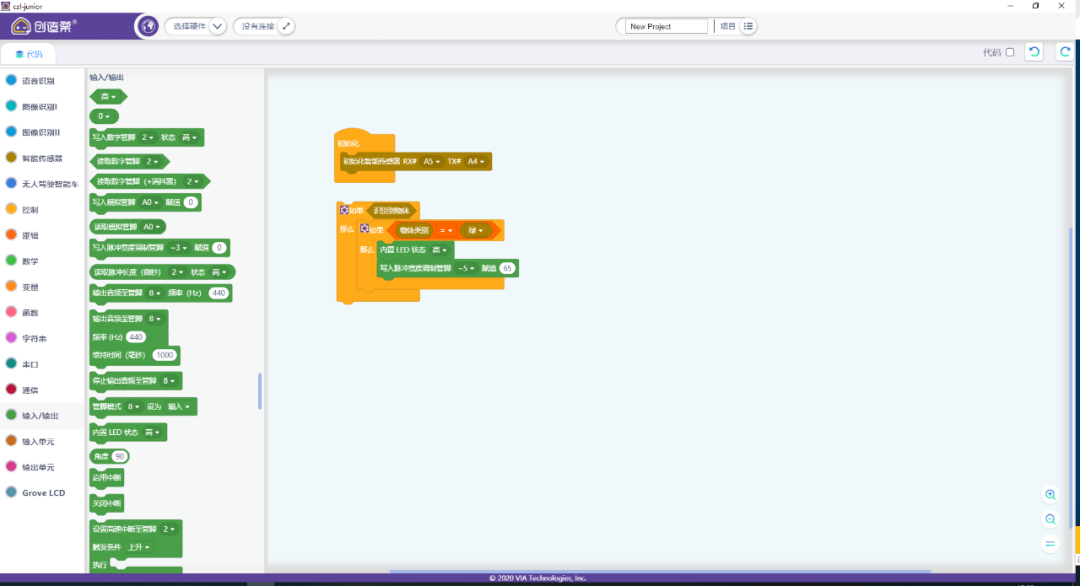
A. 第一层程序积木
从控制程序内选出第一层程序积木,为“初始化”积木,在将视觉传感器程序的“初始化视觉传感器”积木加入“初始化”积木。
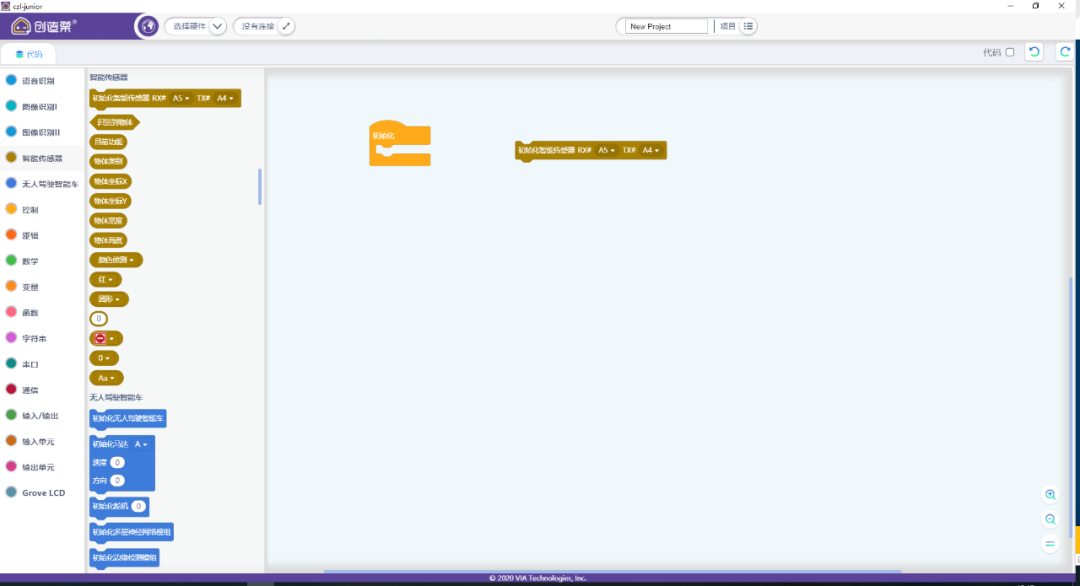
这个积木会将资料传递至威栗camera。
最后,选择管脚0 和1 着会确认扩展板和威栗camera之间有联系。
RX代表接收而TX代表发射。
注: 我们推荐选用管脚0和1会比较稳定(传输程序时,请将此管脚拔起,否则无法传输程序)。
B. 第二层程序积木
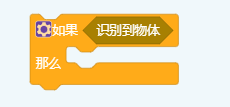
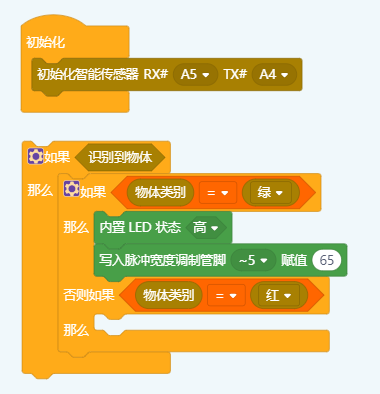
你需要做的第一件事是选取“如果()那么”积木来创造一个项目。这使得威栗camera显示说它在透过从扩展板传来的指令侦测一件物体。
我们需要选取识别到物体积木块,并将其放置在“如果”后面,如下图所示。如果识别到物体则这个条件成立,那么,在积木内的项目会启动。

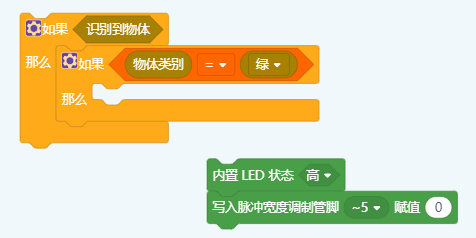
为了保证威栗camera识别准确,我们需要再建立一个“如果()那么”语句。这会使得威栗camera能侦测到任何绿色物体。
选取一个“逻辑”积木和一个“物体类别”积木,设置等号,再从视觉传感器积木类别加一个“绿”积木。

接下来,从“输入/输出”程序类别选取“内建LED状态(高) ”积木,使得威栗camera显示它已感测到绿色,并且会启动马达。
选取“写入脉冲宽度调变管脚()赋值() ”积木并且把管脚值设为5。这是马达的控制管脚(有可能会依版0而有所不同)。
接下来,把马达的速度值至65(这个可以依个人喜好而有所调整)然后把它放在“内建LED状态”积木。
威栗板将在识别到绿色时,命令马达启动并前进。

如有不确定的地方,可检查你的威栗板使用说明书来做确认。如果管脚在积木内选择错误,马达就可能不会启动。
以下是给绿色的一层积木。
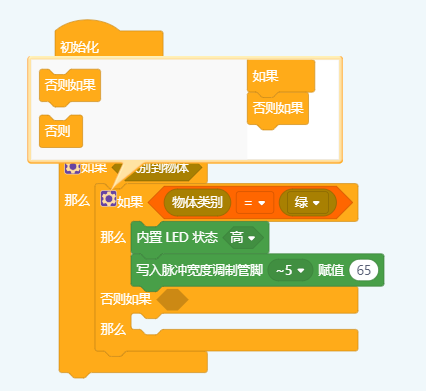
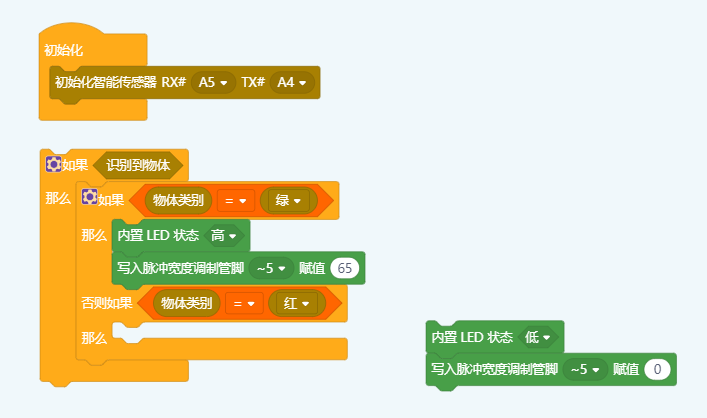
现在我们想要指导让无人车在识别到一个红色物体的时候停止。
点击“如果()那么”积木左上角蓝色齿轮标志,点击“否则如果”积木块,并将它拖拽到“如果”的积木下方。
威栗camera会将这个项目显示至威栗板,导致马达辨识到红色时会停止。

从“输入/输出”类别中,选择“内建LED状态高”程序积木,它会因此报告已检测到红色,并且将马达关机。
选择“写入脉冲宽度调变管脚()赋值() ”程序积木并将其设置为管脚5。管脚5是电动机的控制管脚(会根据威栗板接口设计而不同)。
接下来,将马达的速度值设置为零(可以依据个人喜好调整速度)。
威栗camera识别红色时,威栗板将命令马达关机。
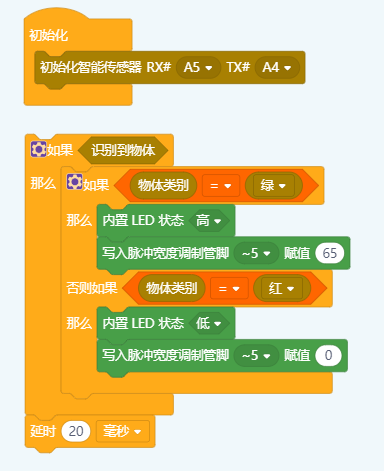
最后,我们将从控制程序类别中,添加延迟20毫秒的积木,在末尾来设置马达的计时器。
如果不确定这些内容,请查阅威栗板使用手册。如果在不同的积木中错误地选择了管脚,则马达可能无法启动。
以下就是绿色和红色的程序积木层。
完成积木后,检查它们以确保它们在其中顺序和管脚设置正确
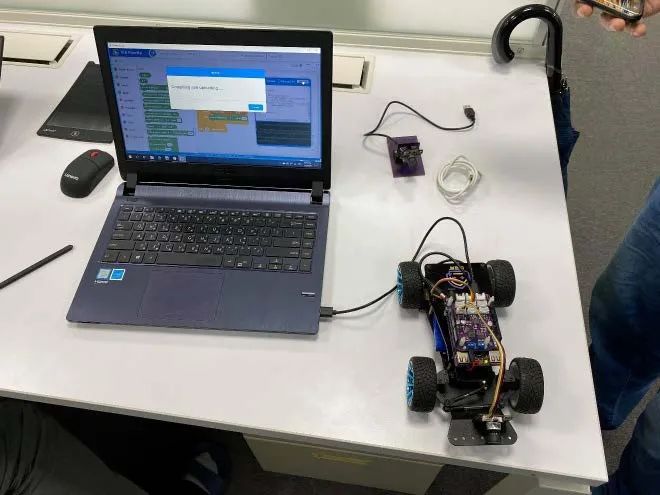
将代码上传至威栗板。
A. 如何将威栗板连接到PC
首先,用USB 2.0/3.0端口将Micro USB 2.0线连接到PC,然后将线的另一端连接至在无人车上威栗板的MicroUSB 2.0端口。
B. 如何上传程式
点击在威栗camera Junior应用程式里左上方的“选择硬件”下拉式选项表箭头,然后选择“ Arduino UNO ”开始建立连接。
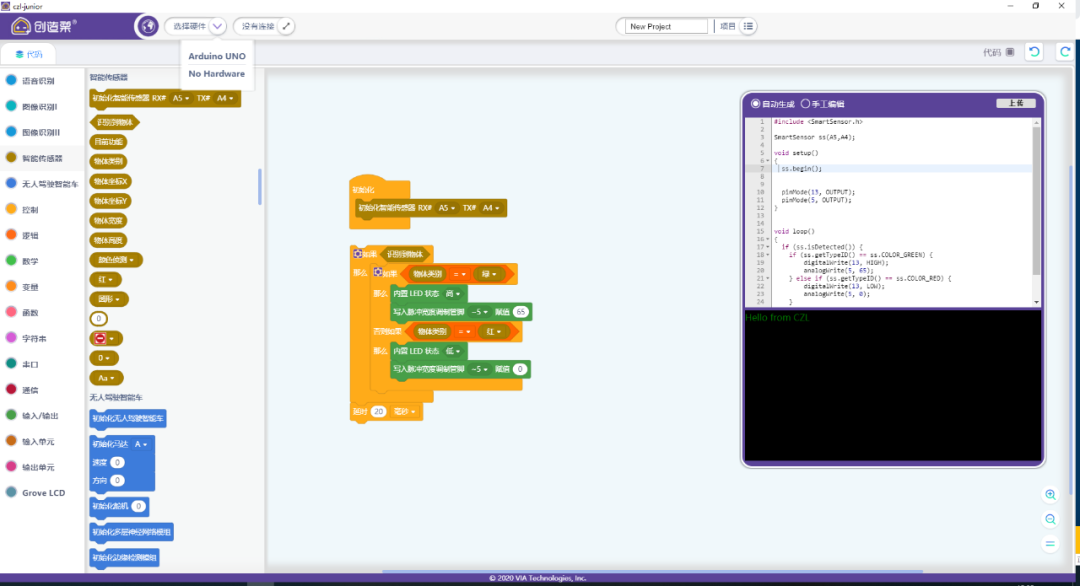
点击“没有连接”下拉箭头,一个弹出窗口屏幕将会显示。
点击“连接”按钮以建立连接。如果PC上没有找到USB连接,您可以使用刷新按钮。
COM端口应该设置为COM4。(注: COM端口可能依PC而不同。)
连接后,点击“回到编辑器”按钮回到威栗camera应用程序。
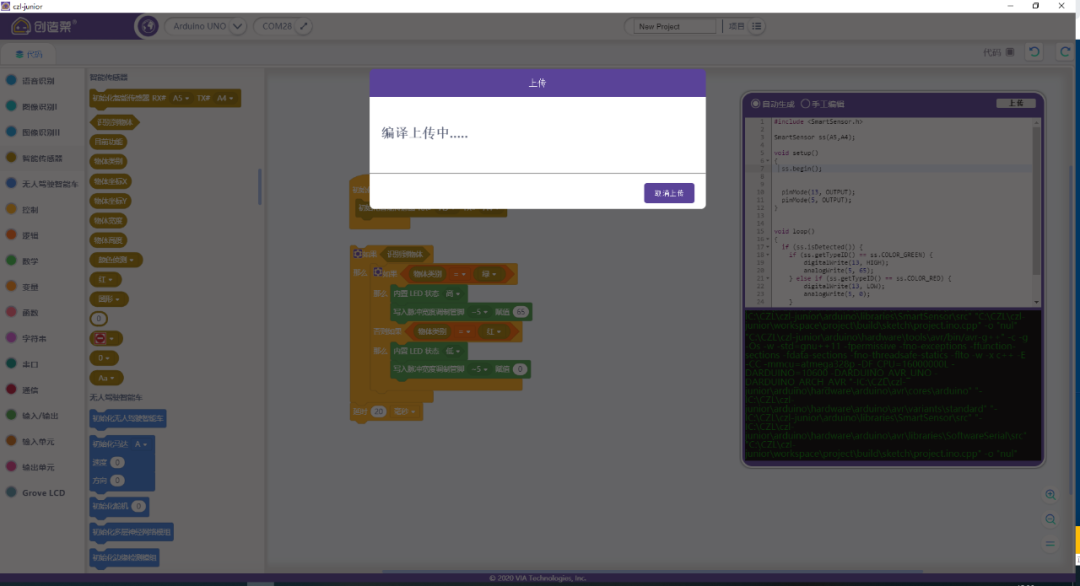
点击“上传”按钮将程式上传到无人车。看到上传完成的消息时即可拔下连接线。
现在,我们已成功联系了威栗camera视觉传感器并将程序上传至在无人车的威栗板。
你可以进行一些测试运行。