舵机
它是一种位置(角度)伺服的驱动器适用于那些需要角度不断变化并可以保持的控制系统

上图中是一个通过语音命令来调用舵机转向的示例程序套装内使用的舵机为180°舵机我们在取值的时候建议范围为1-179°也就是说我们可以让其角度停在1-179°的任意位置上
我们在左侧添加语句部分输入要给系统下达的语音指令
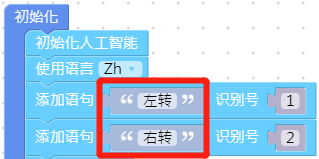
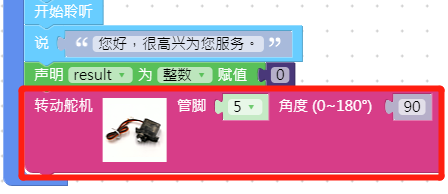
在初始化最后我们还要设置一下舵机的初始位置(1-179°)示例程序中我们需要让舵机进行左右转操作所以我们把角度设置为中间90°位置
调用舵机时,当左转时我们将舵机角度设置为1°延时3秒后,回正到90°位置右转同理
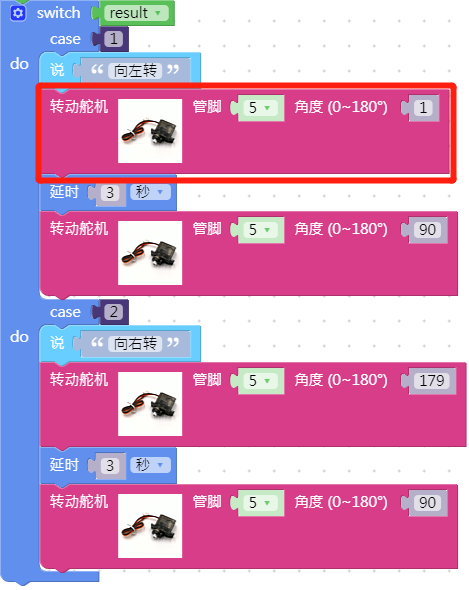
如果我们想要舵机转向后保持这个角度则将延时和回正两行删除即可
