
以下内容均以V1示例程序为例
Q:
为什么V1接通电源后不启动?
A:
遇到该问题通常有以下几种情况:
1.开关未打开。
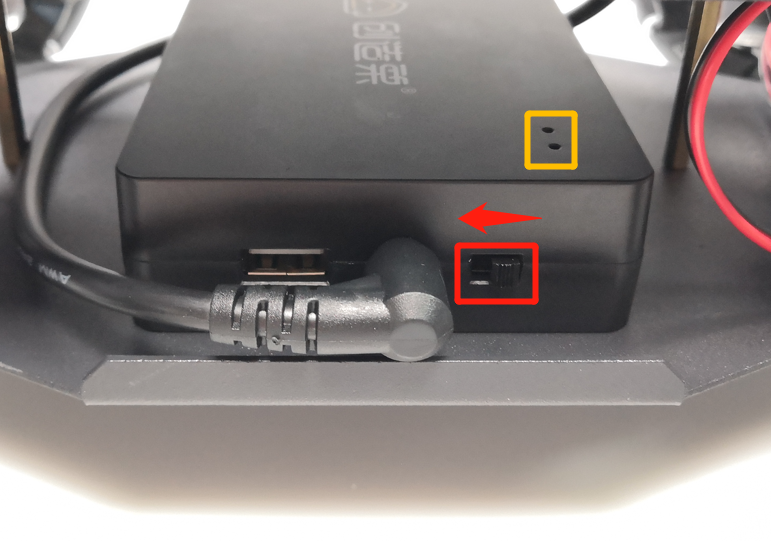
正常情况下,将电源连接至无人车上层扩展板电源接口,打开电池组开关,同时不要忘记无人车扩展板开关也要保持打开,大约20秒后,威栗板电源灯(黄灯)亮起,状态指示灯(红灯)熄灭,扩展板接线柱后侧指示灯亮起(如图所示),无人车启动。

若威栗板电源指示灯未亮起,请检查扩展板电源开关及电池组开关,是否正常打开。
电池组开关打开后,电池组上方指示灯会亮起。(绿灯表示电量充足;红灯表示电量低)


2.输入信号问题。
若开关已全部打开,威栗板电源灯(黄灯)亮起,状态指示灯(红灯)熄灭,扩展板接线柱后侧指示灯未亮起。
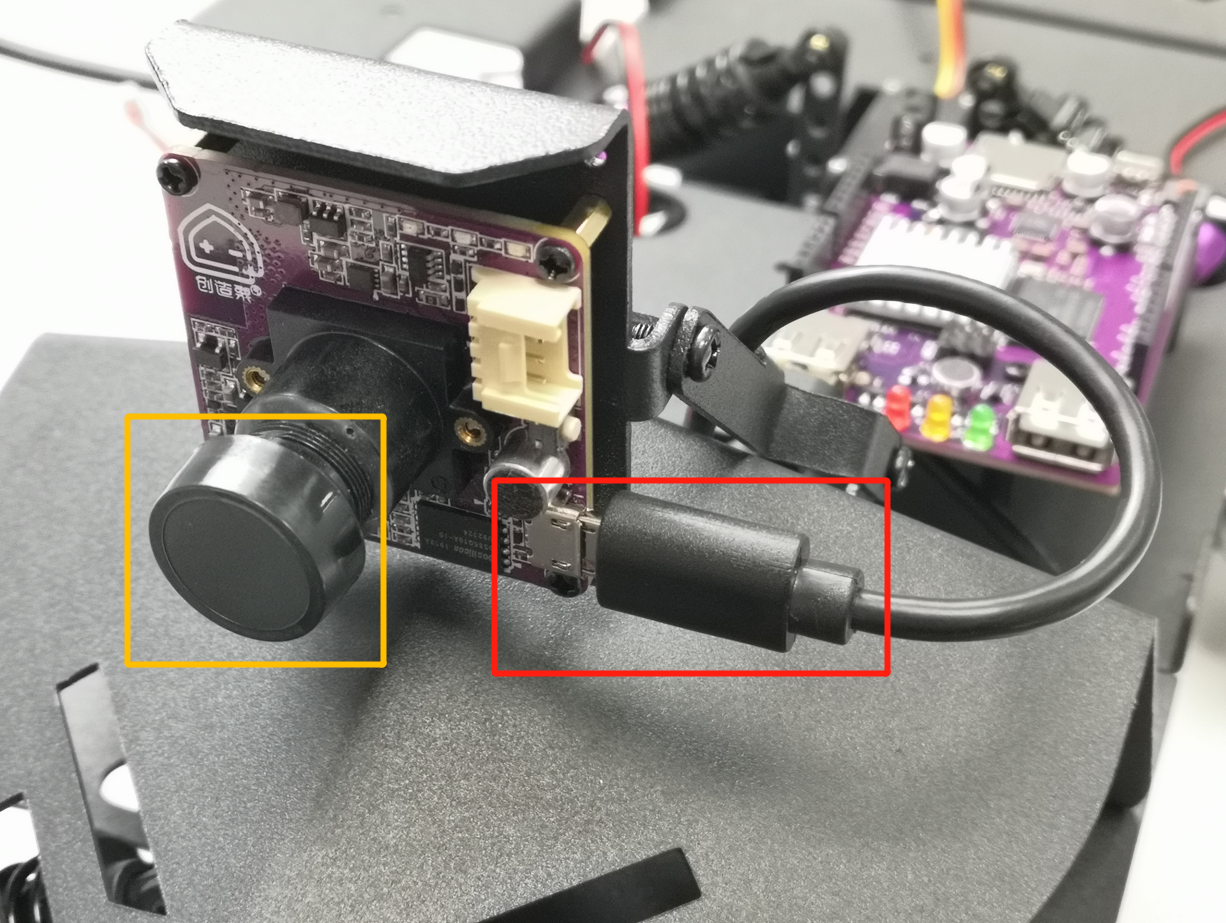
这种情况下通常是由于传感器没有输入信号,导致无人车不启动,此时请检查摄像头是否正确连接;若连接无误,请检查摄像头镜头盖是否已移除。(注:威栗板2个USB接口通用)

3.电池电量不足。检查电池组指示灯,绿灯表示电量充足;红灯表示电量低,请及时充电。充电时请保持电池组开关处于打开状态,充电状态请观察电源适配器上的指示灯,红灯表示充电中,绿灯表示充电完毕,充电时间约2-3小时左右。



Q:
为什么V1直线跑不直,向一侧偏?
A:
舵机角度未按实际情况进行设置。
调试步骤:
1.舵机角度居中设置
一般情况下V1走直线时向一侧发生偏移,通常是舵机角度设置出现了问题,首先我们要进行舵机回正, 将USB数据线Micro USB接口端连接至威栗板Micro USB接口,USB接口端连接至PC端。


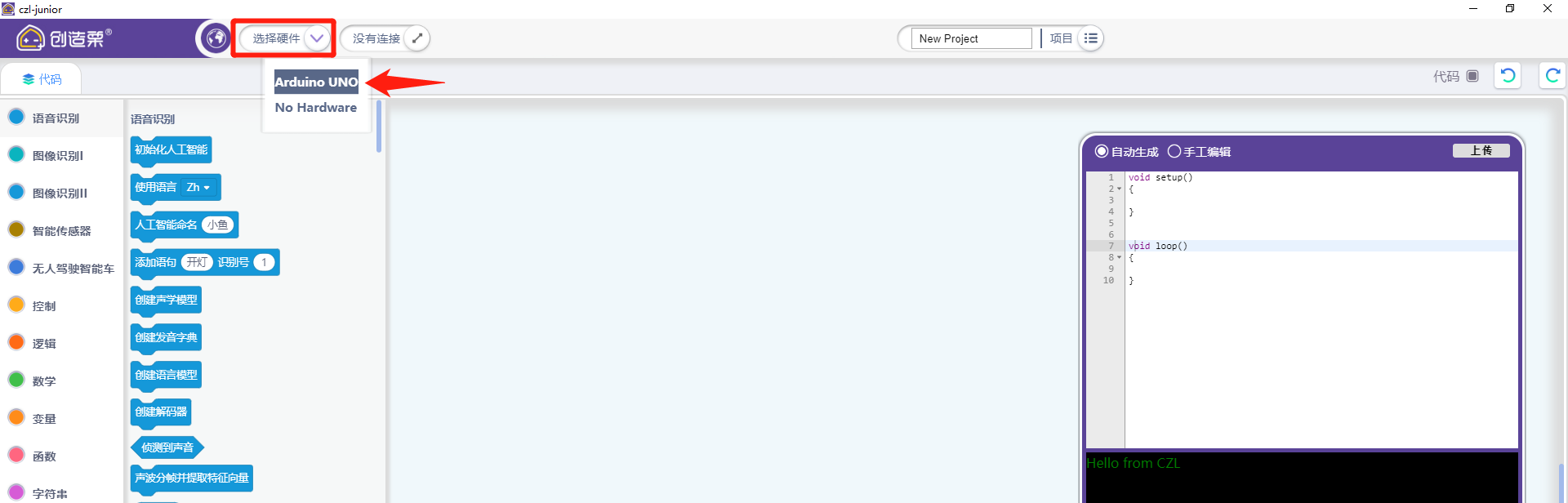
打开创造栗编程软件2.0,在程序主界面上方点击“选择硬件”-选择Arduino UNO。
然后点击“没有连接”,若此时系统已识别威栗板,则会显示对应的COM端口号,点击“连接”即可,若未显示COM端口号,请点击下方刷新。

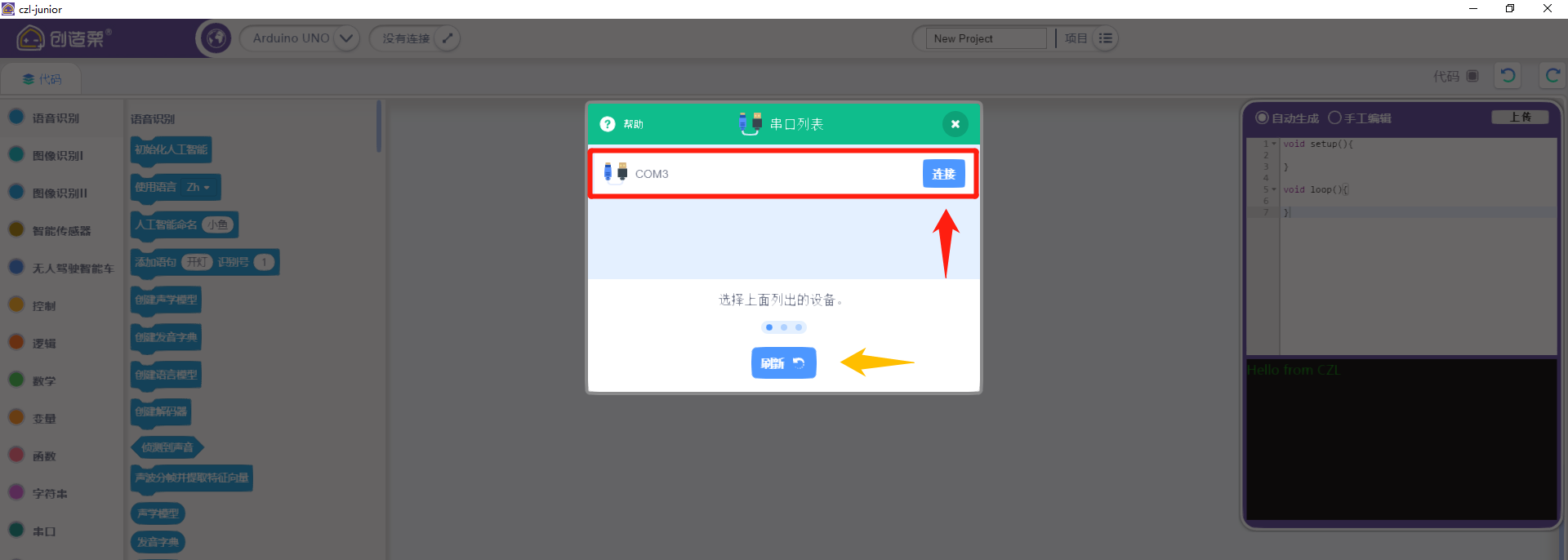
若成功连接,则点击“返回编译器”或“X”返回编程界面即可。

分别从“控制”标签中找到“初始化”,然后从“输出单元”标签中找到“转动舵机”,并拖入到中间编程区域,将舵机管脚分别改为A2和A3与硬件连接保持一致,角度设置为90°。

程序编写完毕后,选择代码面板上的“自动生成”,然后点击“上传”,将程序上传至威栗板。

上传完毕后,断开电脑与威栗板连接,将电源适配器接入无人车扩展板电源接口,并打开扩展板电源开关,此时若舵机处于非90°状态,则会有回正动作;若无回正动作,可能之前已经停在90°位置了。

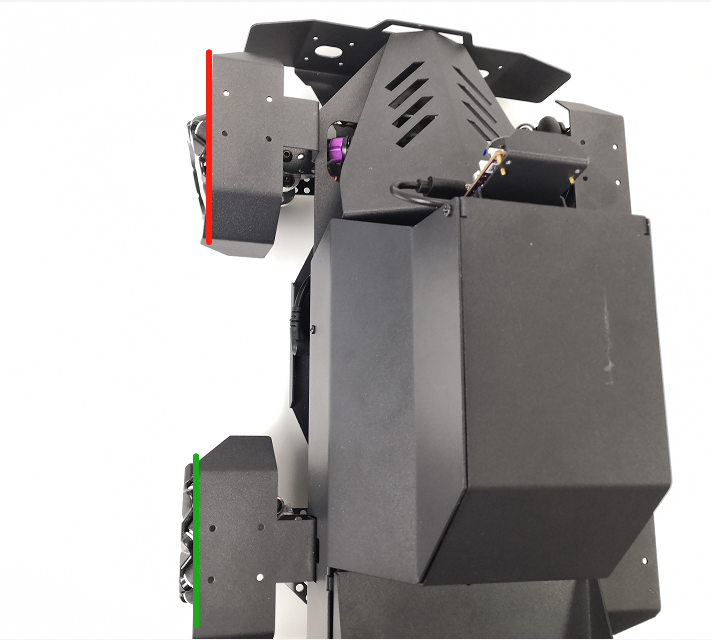
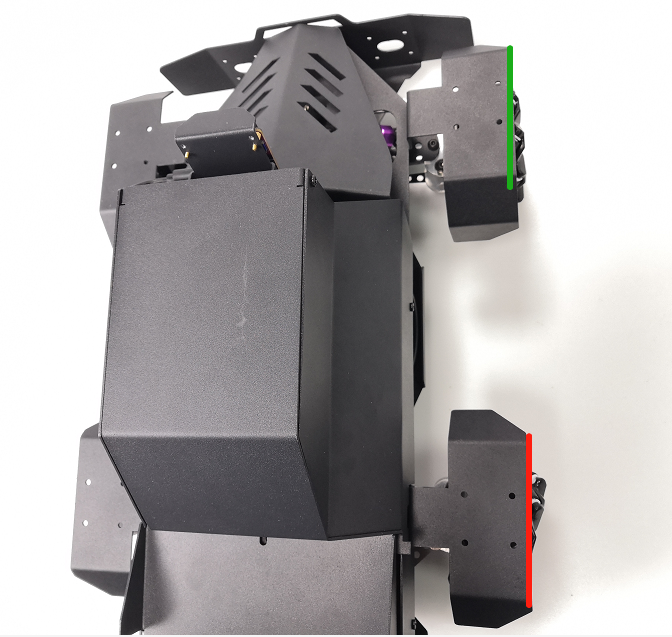
舵机回正后,我们观察舵机臂的角度是否朝向正前方,或者观察4个车轮方向是否朝向正前方,没有偏转现象,如图参考车轮外侧是否与挡泥板边缘平行。


2.直行程序调试
若车轮角度无误,下一步上传使V1保持直行的程序,然后看车能不能跑直线,改函数里面前后桥舵机的角度。
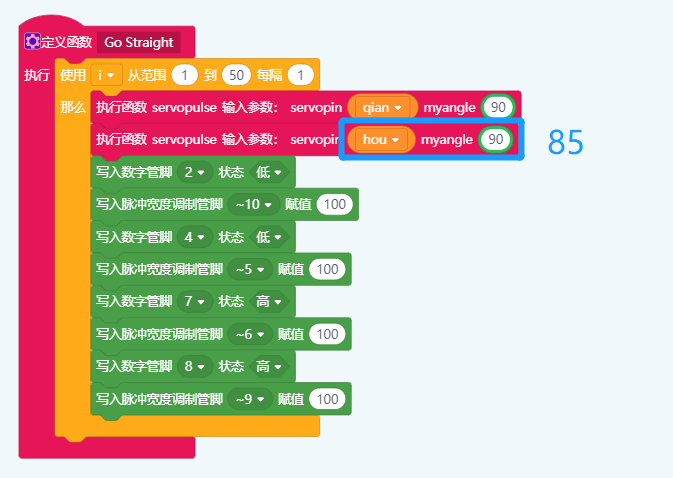
我们在V1的示例程序中删除无人驾驶相关部分程序,仅保留电机和舵机部分的程序,并使V1运行直行函数Go Straight。

上传程序接通电源后,V1就可以保持前后舵机90°位置向前运动了。
此时观察V1实际运动轨迹,产生偏移通常会发生如下几种情况:
以偏左为例
(1)前轮向左偏,后轮正,V1受前轮影响,运动轨迹逐渐向左偏。
这种情况在直行函数中,调大前桥(qian)舵机角度就可以了,可以视偏离角度大小以3-5°左右进行增加。

(2)前后轮都往左偏,V1受前后轮影响,向左前方平移。

这种情况在直行函数中,同时调大前(qian)后(hou)桥舵机角度,可以视偏离角度大小以3-5°左右进行增加。

(3)前轮正,后轮向右偏,V1受后轮影响,运动轨迹逐渐向左偏。
这种情况在直行函数中,调小后桥(hou)舵机角度,可以视偏离角度大小以3-5°左右进行减少。
(4)前轮向左偏,后轮向右偏,V1受前后轮影响,运动轨迹大幅向左偏。
这种情况在直行函数中,调大前桥(qian)角度,调小后桥(hou)角度,可以视偏离角度大小以3-5°左右进行增加或减少。

每次微调角度可以以3-5°为准做测试,避免角度过大损坏舵机。反之V1向右偏同理。
若非上述几种情况,此时需查看程序内4个车轮电机转速是否一致,若一致,请检查联轴器安装是否存在问题,联轴器边缘与电机固定螺丝注意保留一定间隙,避免造成摩擦堵转,对电机转速造成影响。

Q:
为什么存在转向不足或转向过度?
A:
舵机转向角度未按车体实际情况进行套用或差速设置不当。
1.设置舵机转向角度
由于V1在正常巡线时会实时调整方向,所以直线部分调的相对直就可以了,调整完前后桥舵机角度后,我们需要把能够跑直线的前后桥舵机角度记录下来,然后套用到V1示例程序中,按照这个角度作为前后桥舵机的居中角度,将左右转函数前桥设置在向左或向右15-20°左右,后桥可以在10°左右(与前桥转向相反),这样可以保持一个比较好的过弯姿态。
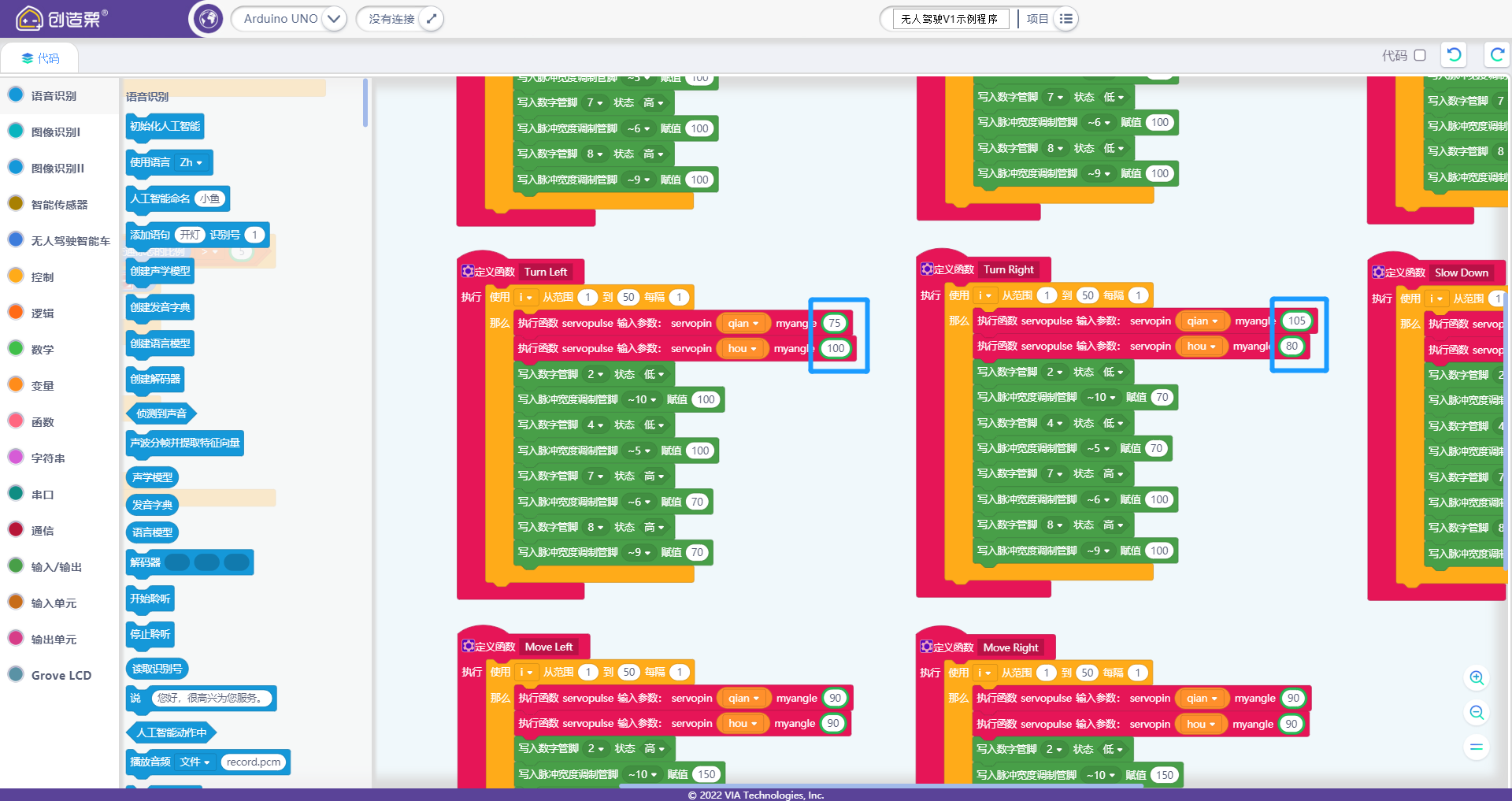
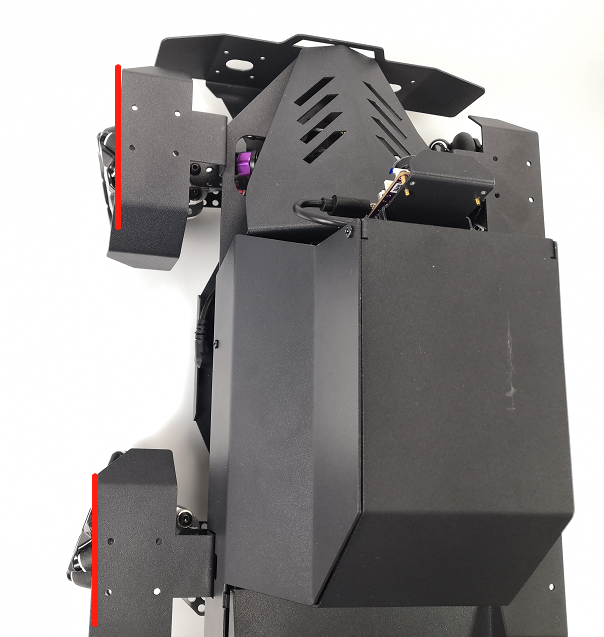
注意:转向结构达到最大转向角度时,图中红框标识部分会与固定转向轴的黑色金属框架发生碰撞,此时若舵机实际角度大于结构所允许的最大转向角度时,舵机会发生堵转,为避免舵机发生损坏,设置角度时请避免该现象发生。

2.设置电机差速
前后桥舵机角度确定以后,调转向时内外侧轮子的差速,一般转向时内侧轮转速相对于外侧,整体速度相当于外侧轮的50%-70%左右,以协助舵机进行转向。

注意:V1转弯半径受“前桥舵机转向角度”、“后桥舵机转向角度”以及“内外侧车轮转速差”3个因素的影响,若转向结构最大转向角度无法满足过弯需求,可适当增加内外侧车轮转速差;反之若车体转向角度过大,则可以适当减少内外侧车轮转速差。
Q:
为什么存在转向过早或过晚的情况?
A:
摄像头角度设置不当。
设置摄像头角度:
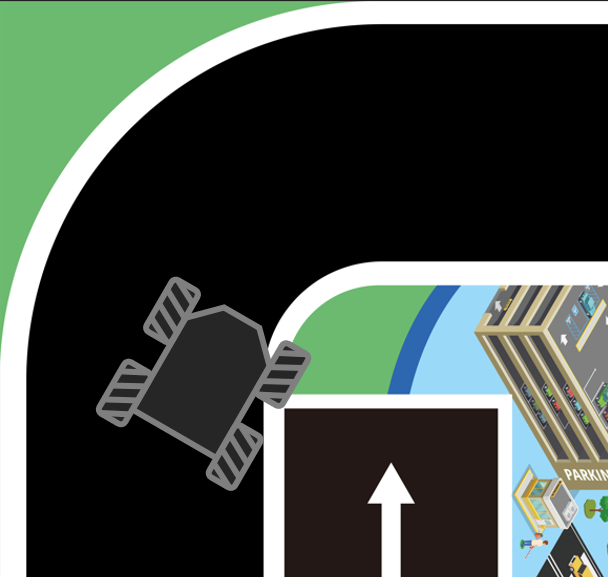
将V1放置车道转弯处,观察运动轨迹,通常会出现以下两种情况:
1.入弯过晚时,无人车贴近或驶出车道外圈边缘时才进行转向。


此时需要把摄像头角度略微调高一点,使无人车视野角度更远一些,从而提前侦测到外圈车道线进行转向。
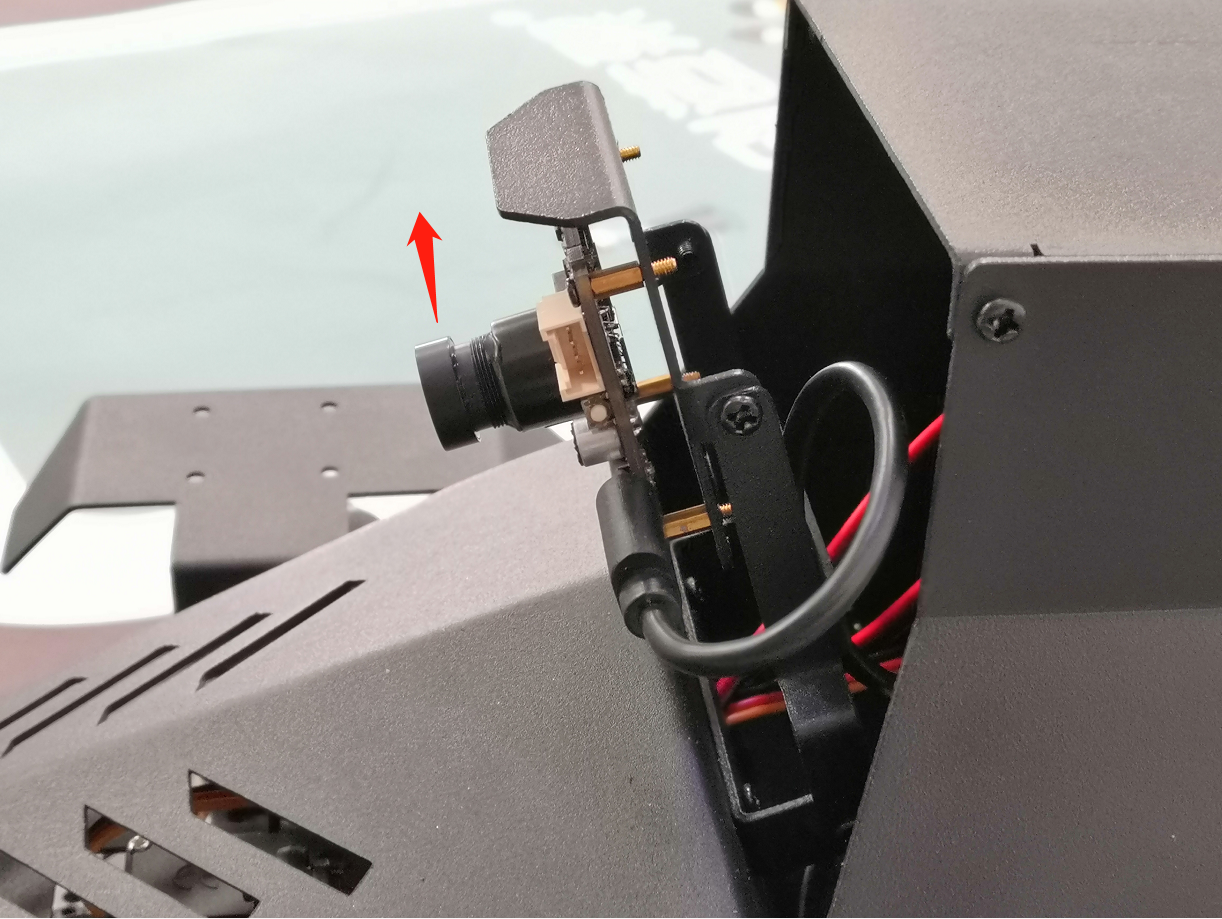
2.入弯过早时,无人车贴近或驶出车道内圈边缘。

此时需要把摄像头角度略微调低一点,使无人车视野角度收近一些,从而晚一些侦测到弯道。

Q:
为什么V1无法正常识别车道?
A:
可能受环境光线影响造成误识别。
受环境光线影响,如下图所示,使用过程中尽量避免复杂的环境光线,尤其是注意避免斜射光源及反光,反光可能会导致无人车误识别(无法区分)车道线。如果使用环境光线比较复杂,建议在地图四周加一圈围挡,以防止光线反射造成的误识别现象。

注意:若无法区分是否因环境光线导致的误识别,可以通过路标进行测试,将路标置于无人车前方,看无人车能否识别路标并作出对应的反馈。(若光线较暗,可以对路标正面进行补光)
Q:
V1平移时车体不正怎么办?
A:
可通过前后轮差速进行补正。
调试方法:
上传使V1平移的程序,观察V1运动轨迹。
我们在V1的示例程序中删除无人驾驶相关部分程序,仅保留电机和舵机部分的程序,并使V1运行右平移函数Move Right。

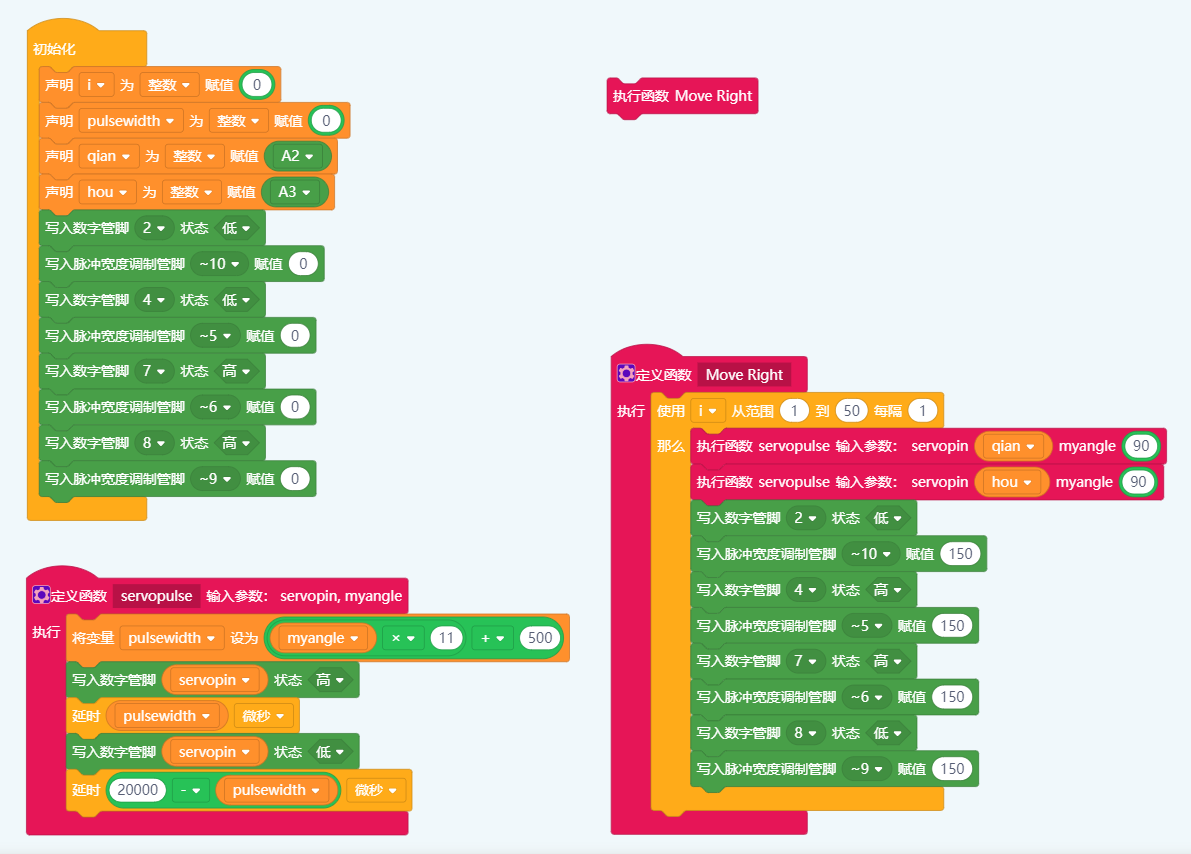
通常车体方向偏移通常会有2种情况:
1.车体平移过程中逐渐偏向右后方

这种情况可以通过适当增加2个后轮的转速进行补正,相当于同时增加了后轮向右的推力,对车尾进行补正。我们对程序中右平移函数控制后轮的两个数值进行上调,速度调试可以以5为基准进行增加或减少,视具体情况而定。

2.车体平移过程中逐渐偏向右前方

这种情况可以通过适当增加2个前轮的转速进行补正,相当于同时增加了前轮向右的推力,对车头进行补正。我们对程序中右平移函数控制前轮的两个数值进行上调。
向左平移时发生偏移同理,仅需要调整前后轮差速进行补正即可。
关于威盛创造栗
▼▼▼
威盛创造栗是威盛集团旗下的人工智能教育领导品牌,致力于提供青少年人工智能教育解决方案,将智能硬件、智能软件平台、课程体系、师资培训、赛事活动、等级考试、AI实验室项目融为一体。教学对象实现全学段覆盖,教学场景涉及课堂教学、社团活动及实验教学等全方位、多场景,打造定制化人工智能教育全方位解决方案。
