

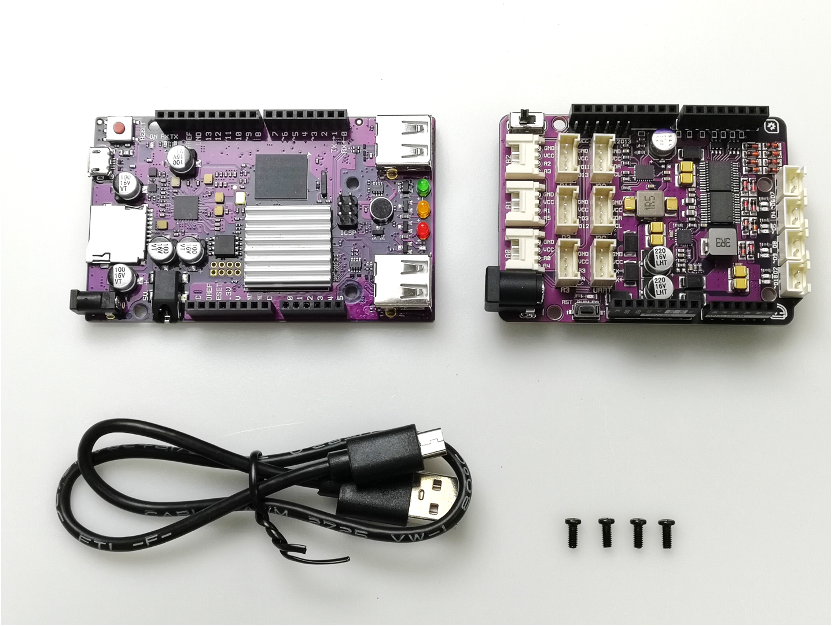
| 所需器材 | |
| 威栗板 | 1 |
| 无人车扩展板 | 1 |
| Micro USB数据线 | 1(黑色,短线) |
| M2.5*6PM黑色螺丝 | 4 |
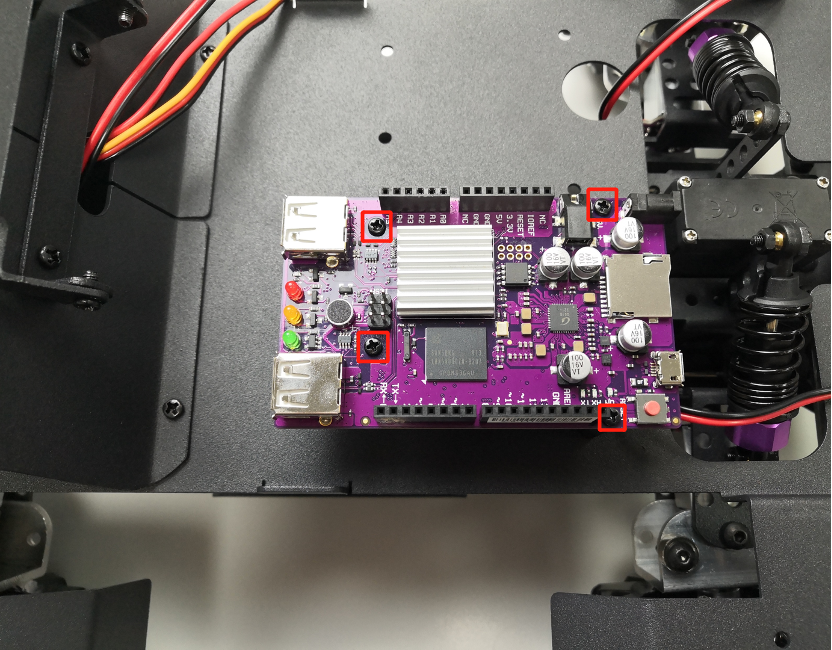
使用M2.5*6PM黑色螺丝*4,将威栗板固定在无人车上层面板的4个M2.5*20双通黑色塑胶六角柱上。
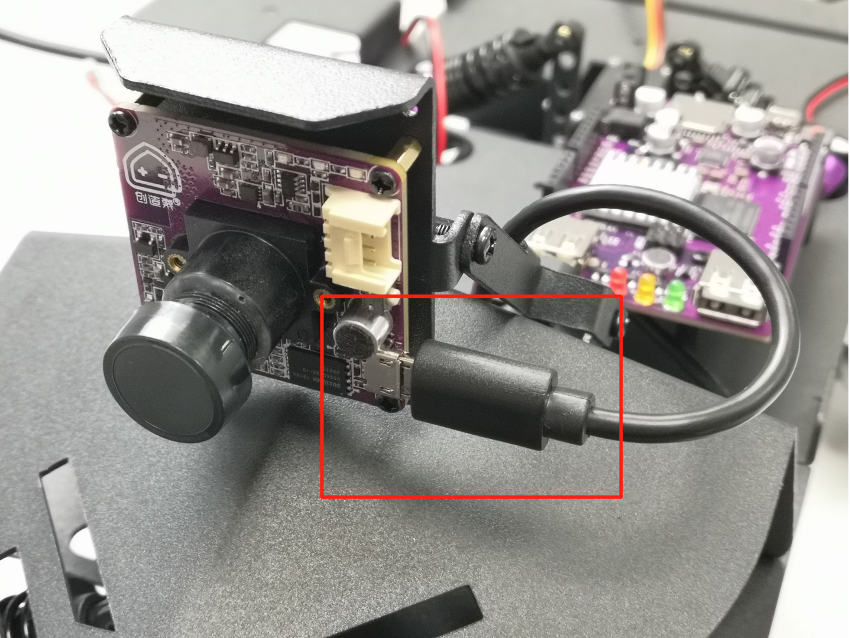
将威栗Camera通过Micro USB数据线与威栗板USB接口连接(主板两侧USB接口通用)。

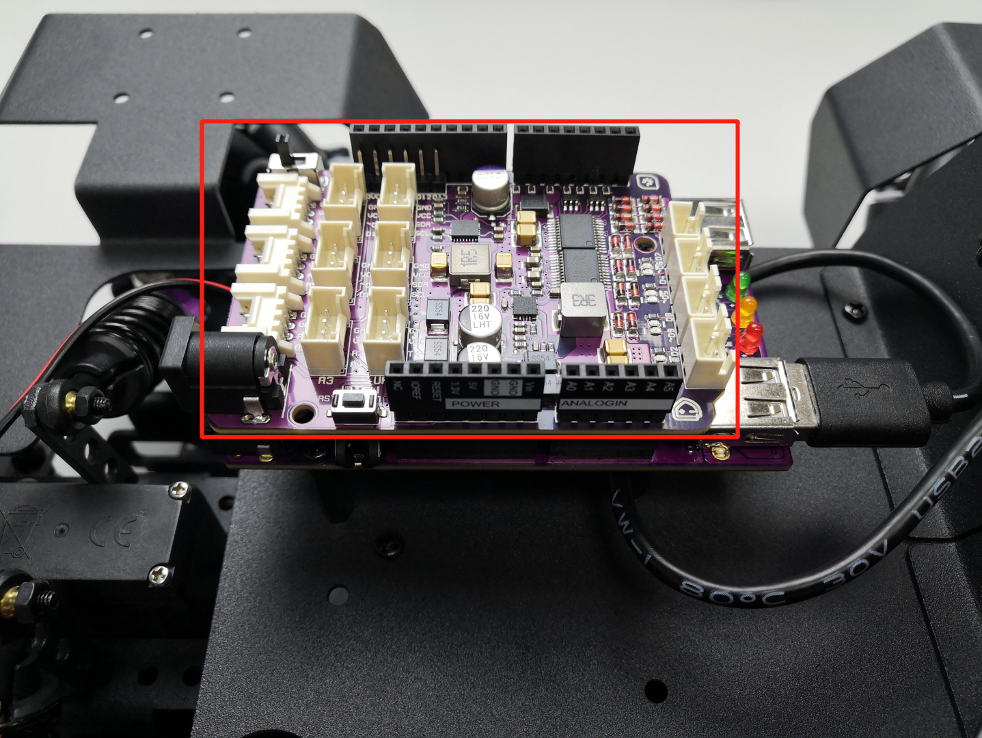
将无人车扩展板扣在威栗板上方(注意安装方向,注意两侧排针长短)。
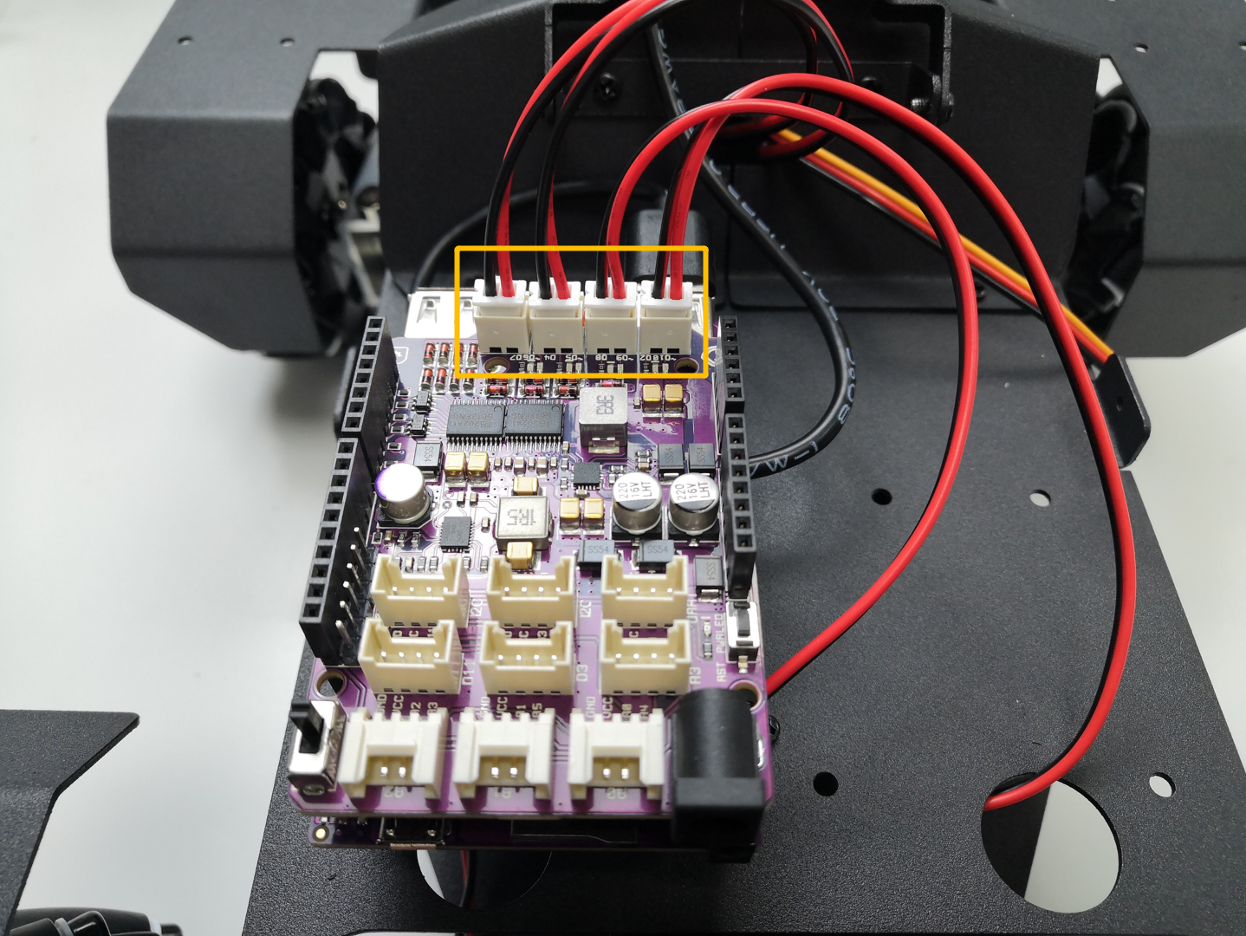
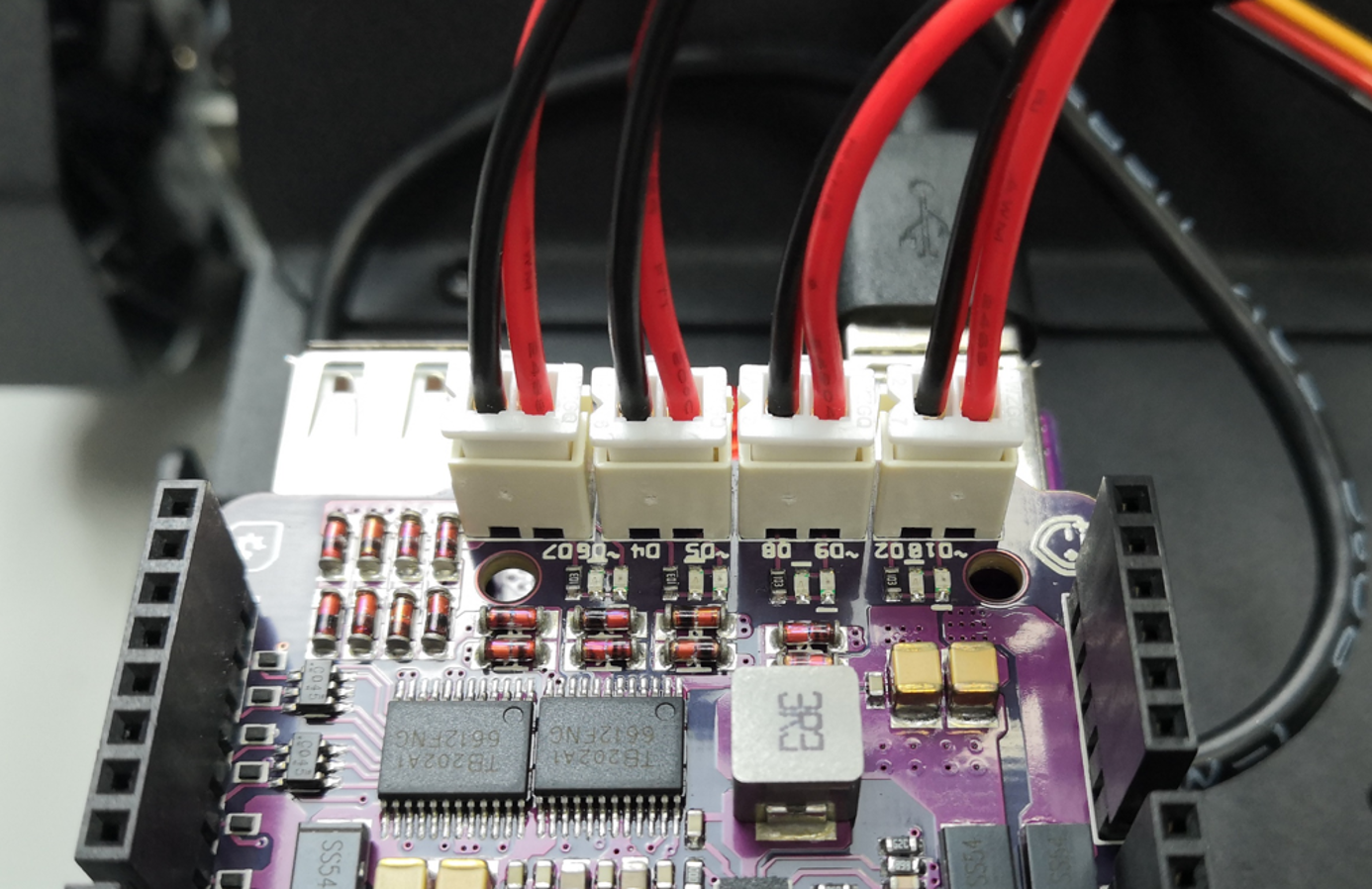
连接前桥后桥电机线,无人车扩展板前部接口,从后向前看,从左到右依次为:
~D6,D7左前轮;
~D5,D4右前轮;
~D9,D8左后轮;
~D10,D2右后轮
(硬件连接接口须与程序编写时保持一致)
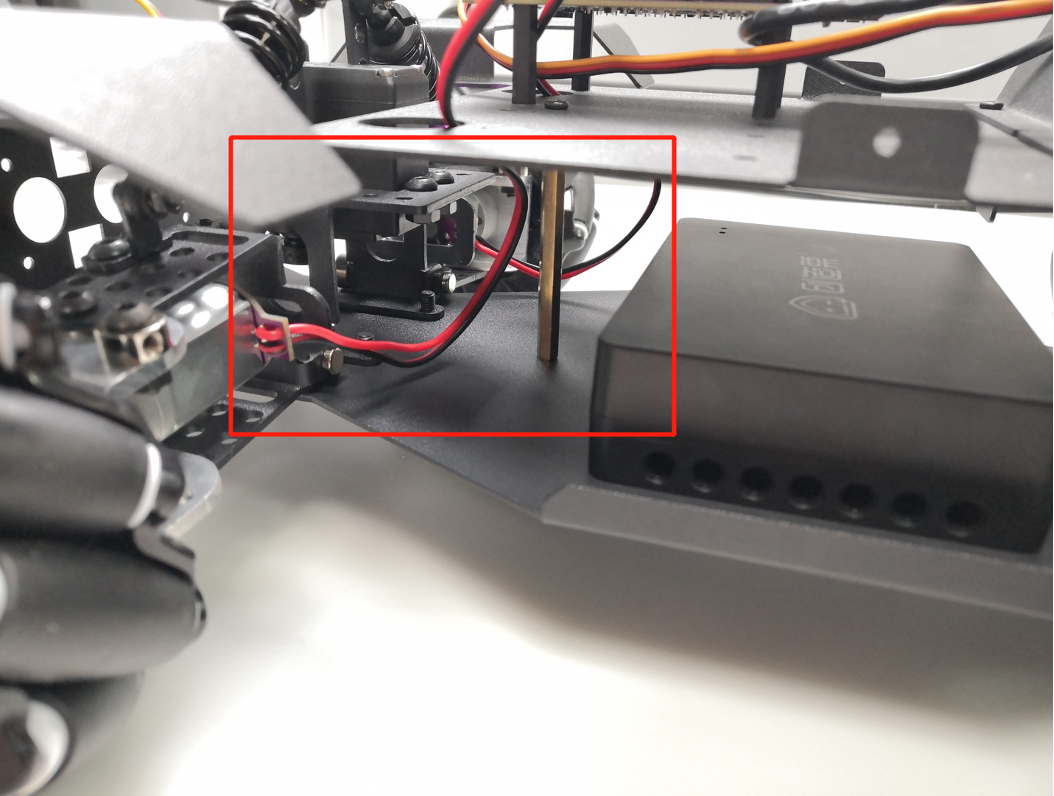
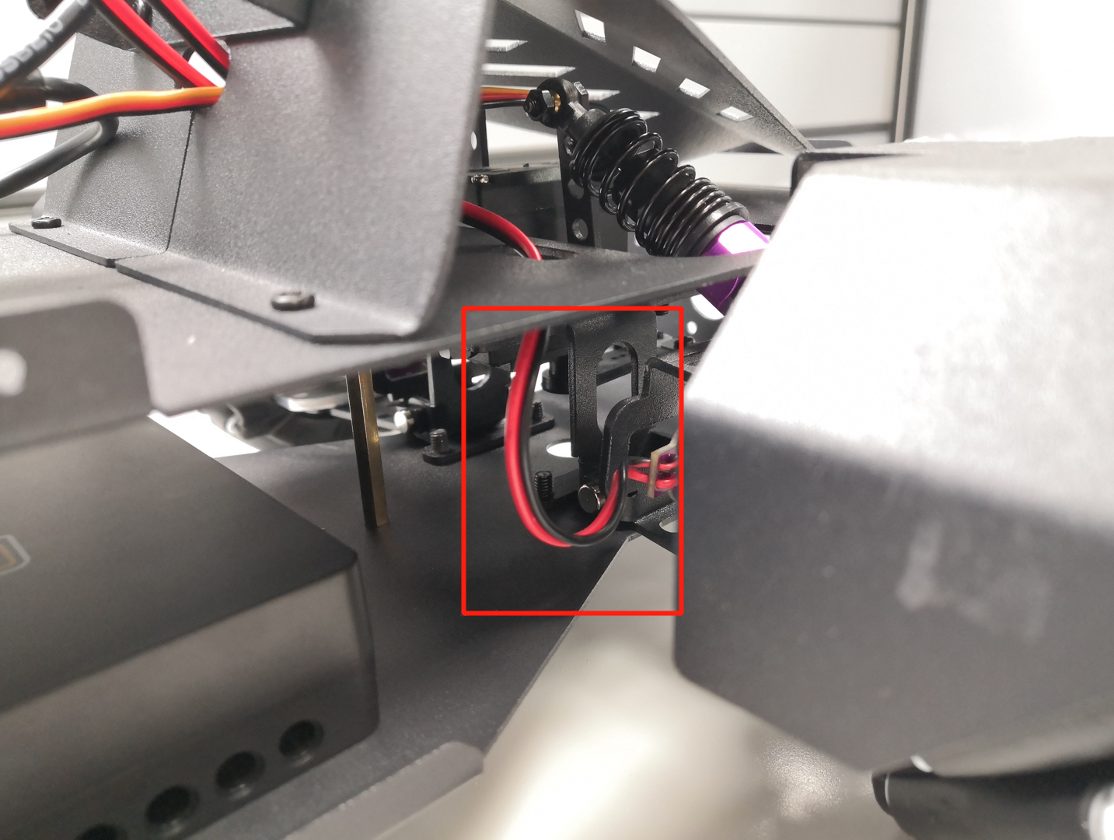
连接好电机后,适当整理下电机线路,给下层车体部分留的线长一些,为转向时电机摆动留出余量,避免拉拽现象发生。
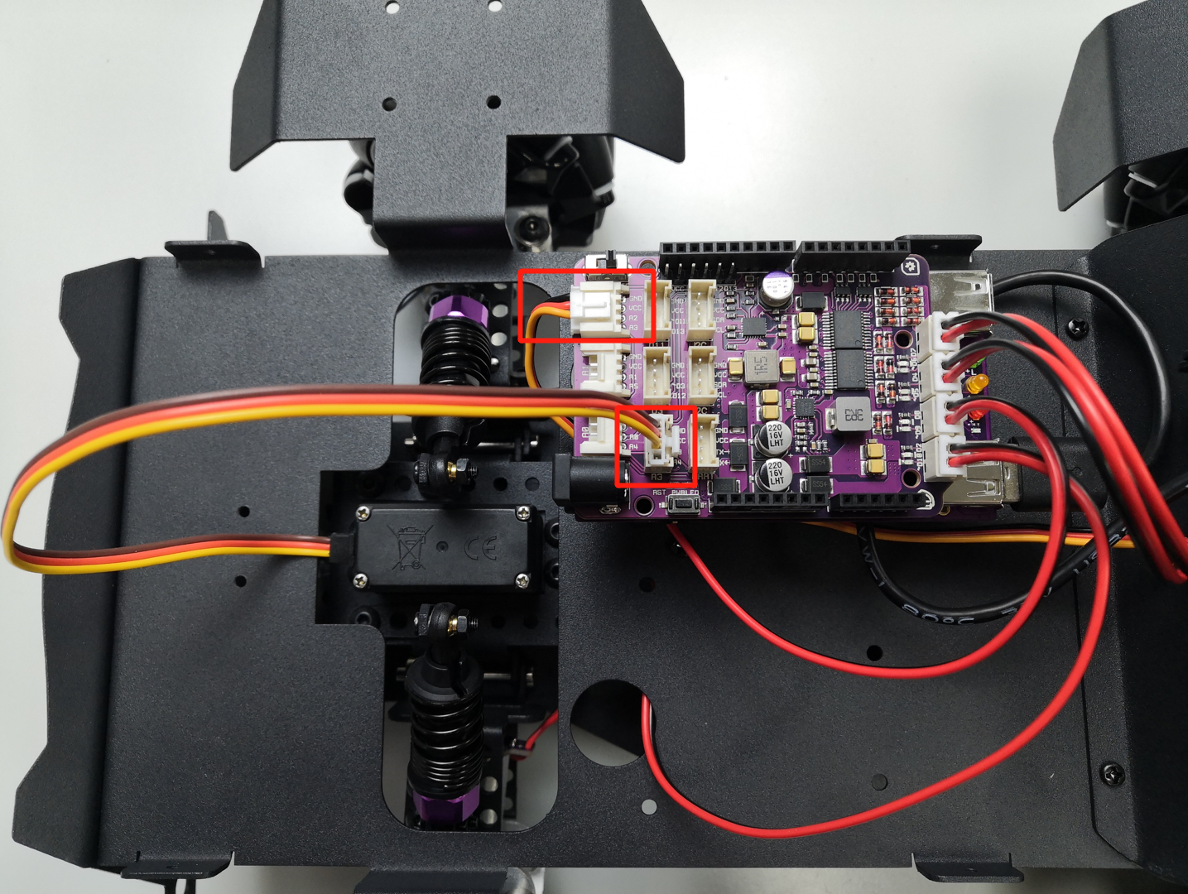
连接舵机线,前桥舵机连接至无人车扩展板A2接口,后桥舵机连接至无人车扩展板A3接口,以舵机黄色信号线线序为准(硬件接口须与程序编写时保持一致) 。
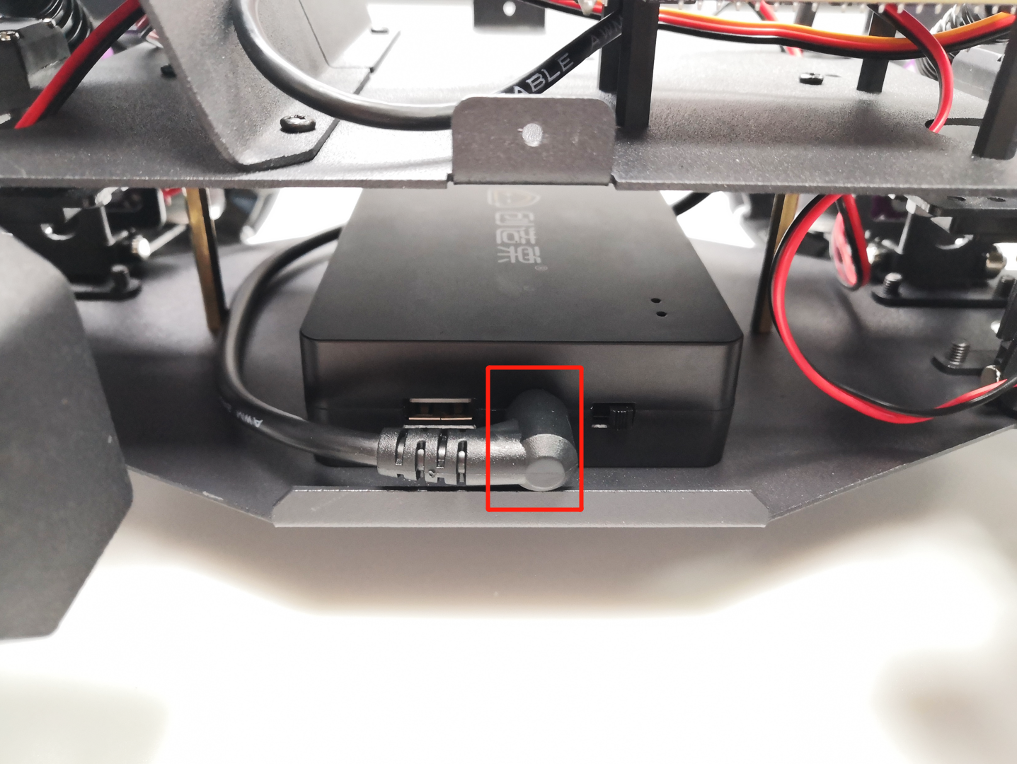
取出双L头电源线,将电池组与无人车扩展板电源接口进行连接(连接前请确保电池组和无人车扩展板开关处于关闭状态)。


关于威盛创造栗
▼▼▼
威盛创造栗是威盛集团旗下的人工智能教育领导品牌,致力于提供青少年人工智能教育解决方案,将智能硬件、智能软件平台、课程体系、师资培训、赛事活动、等级考试、AI实验室项目融为一体。教学对象实现全学段覆盖,教学场景涉及课堂教学、社团活动及实验教学等全方位、多场景,打造定制化人工智能教育全方位解决方案。

